Comunicación presentada al V Congreso Smart Grids
Autores
- Alejandro Martín Crespo, Investigador, Centro Tecnológico CARTIF
- Sergio Saludes Rodil, Director del Área de Smart Grids, Centro Tecnológico CARTIF
Resumen
En este trabajo se expone un sistema de control para una batería virtual compuesta por electrodomésticos controlados por termostato (TCL), los cuales cuentan con una gran inercia térmica y permiten el almacenamiento de energía. La batería virtual es empleada para proporcionar servicios de regulación a la red eléctrica, actividad que se ha visto dificultada con la mayor integración de las energías renovables en el sistema eléctrico. El método de control presentado permite seguir de forma muy precisa la señal enviada por el operador de la red, gracias a los conceptos de disponibilidad y potencia extra. En el artículo se explica el modelo térmico empleado para las TCL, así como el modelo de la batería virtual. Además, se presentan los resultados obtenidos en una simulación realizada con el programa MATLAB y considerando una población de 1000 TCL heterogéneas idealizadas. Los resultados muestran que la incercia térmica de un conjunto de TCL puede aprovecharse para dar servicios de equilibrado sin que se vea comprometido el confort de los usuarios.
Palabras clave
Batería Virtual, TCL, Regulación de Red, Control, Smart Grids, Respuesta a la Demanda
Introducción
La penetración de fuentes de energía renovable en el sistema eléctrico es cada vez mayor, lo cual permite reducir las emisiones de elementos contaminantes y gases de efecto invernadero. Sin embargo, la impredecibilidad de este tipo de energías plantea un nuevo reto a la casación de demanda y generación en el sistema eléctrico. Por ello es necesario incrementar los esfuerzos en la investigación y el desarrollo de nuevos métodos de regulación de red que solventen este problema, así como mejorar los actualmente existentes.
Algunos electrodomésticos disponen de flexibilidad gracias a su inercia térmica inherente o a la que proporcionan las viviendas o locales donde se encuentran. Esta flexibilidad puede emplearse para modelar una batería virtual capaz de proporcionar servicios auxiliares de regulación a la red eléctrica, modificando su potencia y estado de carga de la forma que requiera el operador del sistema. Este requerimiento de funcionamiento se basará en las necesidades de la red eléctrica y los parámetros que definen la batería virtual (capacidad, estado de carga y potencias máximas de carga y descarga), los cuales pueden ser calculados.
Los dispositivos que conforman la batería virtual se denominan TCL (thermostatically controlled loads, cargas controladas por termostato). Su regulación es posible mediante un algoritmo de control que decide en cada momento qué electrodomésticos deben permanecer encendidos y cuáles no, según las necesidades de la red eléctrica y las preferencias de confort del usuario, asegurando en todo momento que las consignas de funcionamiento se cumplan adecuadamente.
La batería virtual, las TCL y su utilidad a la hora de proporcionar servicios auxiliares de regulación a la red son conceptos que han sido estudiados en los últimos años. [1] y [2] exponen un método empleado para calcular los parámetros de la batería, así como una forma de llevar a cabo el control. En ambos casos, el algoritmo empleado para la regulación se basa en la temperatura instantánea de las TCL. En [4] se explica otro método de control distinto, tomando como referencia el tiempo restante hasta el encendido o apagado de las TCL. En [3] se habla de disponibilidad, concepto que contempla la posibilidad de que las TCL no sean tenidas en cuenta para la regulación en función de sus necesidades individuales. Este es un concepto importante y fundamental a la hora de llevar a cabo exitosamente experimentos de control de un conjunto de TCL. El empleo de baterías virtuales puede reportar beneficios económicos en mercados eléctricos de carácter intradiario, como se indica en [6].
Los resultados publicados indican que la precisión con la que los mecanismos de control siguen la señal de potencia del operador de la red es relativamente baja. Los avances que se muestran en este trabajo consisten en el método por el que el control de la batería virtual decide qué TCL deben ser apagadas o encendidas. Para lograrlo se presentan los conceptos de disponibilidad y potencia extra. El método también permite determinar con antelación los parámetros de la batería virtual.
Metodología
Para poder utilizar correctamente la energía almacenada en las TCL es necesario contar con modelos que las caractericen, tanto de forma individual como agregadas en una batería virtual. Idealmente se emplearían sistemas de medida inteligente que determinasen en cada instante el estado real de cada TCL y su entorno, aunque el coste acarreado sería mucho más elevado.
Una vez solucionado el problema de conocer la evolución del comportamiento de las TCL con el tiempo, se puede definir el sistema de control de la batería virtual. Su fin es el de garantizar el seguimiento de la señal del operador del sistema, lo cual será posible siempre que no se viole ninguna de las restricciones existentes impuestas por los usuarios.
Modelo de las TCL
El modelo térmico empleado para caracterizar la evolución de las TCL en el tiempo es el que se describe en [3], y es:
![]()
donde θ es la temperatura en la TCL en ºC, θa es la temperatura ambiente en ºC, u es el estado de operación (1 encendido, 0 apagado), ω es la perturbación en kW, i hace referencia a la TCL i-ésima y k hace referencia al instante de tiempo. g y θg son:
![]()
donde Rth es la resistencia térmica en ºC/kW, Cth es la capacidad calorífica en kWh/ºC, P es la potencia nominal (positiva si la TCL enfría y negativa si calienta) en kW y η es coeficiente de rendimiento (COP).
Modelo de la batería virtual
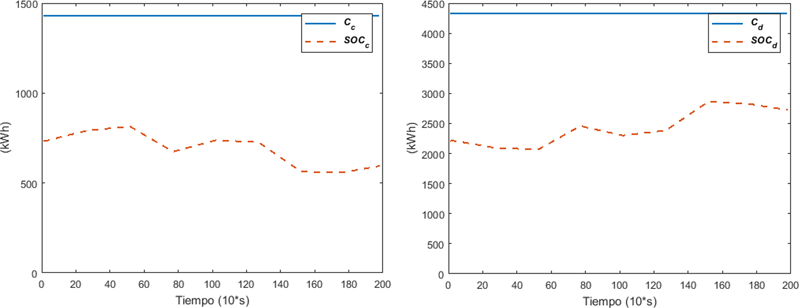
La batería virtual queda definida por varios parámetros fundamentales: la capacidad para carga (Cc), el estado de carga para carga (SOCc), la capacidad para descarga (Cd), el estado de carga para descarga (SOCd), la potencia máxima de carga que puede llegar a dar el sistema (n+), la potencia máxima de carga instantánea (n’+), la potencia máxima de descarga que puede llegar a dar el sistema (n–) y la potencia máxima de descarga instantánea (n’–).
Como se puede apreciar, existen dos capacidades distintas, lo cual difiere del concepto de batería convencional. Esto es así debido a que el tiempo que tarda en cargarse la batería virtual no es el mismo que el que tarda en descargarse por causa de diversos factores, como la resistencia térmica del aislamiento y la capacidad calorífica. También, se diferencia entre dos tipos de potencia máxima: la que podría llegar a dar el sistema y la instantánea. La primera se calcula sin tener en cuenta las TCL no disponibles, mientras que la segunda sí que lo hace.
Para calcular Cc y Cd se recurre a un algoritmo cuyo objetivo es calcular el tiempo que tardaría cada TCL en enfriarse o calentarse desde un extremo de la banda de confort definida por el usuario hasta el extremo opuesto. La banda de confort es un rango de temperaturas en torno a la temperatura deseada que define la torelancia del usuario. Es necesario contar con la previsión de la temperatura ambiente de las próximas horas o días, dependiendo del tipo de TCL.
SOCc y SOCd se hallan de forma similar a las capacidades, aunque partiendo en el algoritmo de la temperatura actual en la TCL.
Las expresiones que permiten calcular n+ y n– son:
donde φ es el tipo de TCL (0 si enfría y 1 si calienta) y PO es la potencia de consumo media necesaria para mantener la temperatura de consigna indicada por el usuario. PO se calcula con la siguiente ecuación:
El cálculo de n’+ y n’– se explica en la sección Metodología del controlador.
Metodología del controlador
El esquema del controlador desarrollado es el mostrado en la Figura 1.
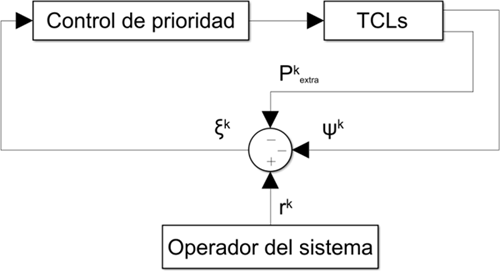
ψ es la desviación de potencia que presenta el sistema en kW, Pextra es la potencia extra a encender o a apagar en kW, r es la señal del operador del sistema o batería virtual en kW (positivo para la carga, negativo para la descarga) y ξ es la señal de regulación en kW. El significado de todas estas variables es explicado más adelante.
La operación del controlador se divide en tres etapas: Comprobación del estado de las TCL, Agregación y Control de prioridad. En cada una de ellas opera un algoritmo distinto.
Comprobación del estado de las TCL
El objetivo de esta etapa es determinar el estado en el instante actual de cada una de las TCL y su comportamiento en el instante siguiente. El resultado obtenido es el valor que toma la variable disponibilidad (λ): 0 en caso de no estar disponible, es decir, cuando la TCL no puede ser considerada para la regulación llevada a cabo en el Control de prioridad, y 1 si sí lo está. Esta primera etapa se desarrollaría de forma individual por el control propio de cada TCL, ya que si se llevara a cabo de manera centralizada implicaría un gran tráfico de datos, lo cual es inviable.
El algoritmo de esta etapa se encarga de predecir la temperatura que va a alcanzar cada TCL en el instante siguiente. Si dicha temperatura se encuentra fuera de la banda de confort, la TCL se marca como no disponible y, si es necesario, cambia su estado de operación. Dicho cambio se produce cuando el estado de operación vigente provoca que la temperatura se aleje cada vez más de la banda de confort. El algoritmo también comprueba el tiempo que ha trascurrido desde la última vez que se cambió el estado y, si es inferior a un determinado valor, la TCL correspondiente no está disponible. Esta comprobación se lleva a cabo para evitar averías en las TCL a causa de cambiar el estado de operación repetidamente en poco tiempo.
Además, se calcula Pextra , un parámetro que permite cuantificar la potencia que hay que corregir en el Control de Prioridad a causa de las TCL no disponibles que van a cambiar de estado en el próximo instante. Otros parámetros calculados son Pextramas y Pextramenos, los cuales se encargar de cuantificar la potencia total de las TCL que no pueden cambiar de estatus en el instante siguiente. Ambos son necesarios para hallar n’+ y n’–, respectivamente.
Agregación
En esta etapa se realiza la agregación de las TCL. Se compara la desviación de potencia del conjunto en el instante actual (ψ) con respecto a su potencia base y la potencia extra (Pextra) con la señal proporcionada por el operador del sistema (r). De este cálculo se obtiene una señal de regulación (ξ), empleada en el Control de Prioridad.
En la Agregación también se calculan la potencia máxima de carga instantánea (n’+) y la potencia máxima de descarga instantánea (n’–) mediante las siguientes ecuaciones:
Estas dos variables permiten medir la máxima potencia que se le puede pedir al sistema en el instante siguiente, información que debe ser trasmitida junto con las capacidades y los estados de carga al operador del sistema, quien calculará rk+1 en consecuencia.
Control de prioridad
En esta última etapa se analiza la señal de regulación (ξ) y se decide qué TCL deben ser encendidas y apagadas. Esta decisión se basa en un sistema de prioridad, la cual se asigna mediante un algoritmo que determina cuánto tiempo puede permanecer cada TCL apagada o encendida, según corresponda.
El objetivo es cambiar el estado de operación de las TCL más prioritarias hasta conseguir equilibrar la potencia instantánea del conjunto con la solicitada por el operador del sistema, cubriendo las desviaciones causadas por las TCL que se van a encender o apagar por necesidad. En ningún caso la desviación de potencia del sistema (ψ) resultante será superior a n’+ y n’–.
Resultados
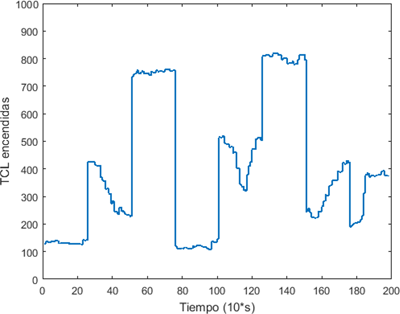
Con el objetivo de comprobar y analizar el método de control desarrollado se ha realizado un programa en MATLAB con el que se han obtenido los resultados mostrados en las Figuras 2-6.
Se ha tenido en cuenta una población de 1000 TCL domésticas idealizadas: 250 aires acondicionados, 250 frigoríficos, 250 bombas de calor y 250 calentadores eléctricos de agua. Los dos primeros tipos de TCL enfrían el medio, mientras que los dos segundos lo calientan. Hay que tener en cuenta que en los casos de las bombas de calor y los aires acondicionados la inercia térmica la proporciona el recinto en el que estén instalados. En la Tabla I se indican los parámetros utilizados en la simulación para cada clase de TCL, los cuales se han aleatorizado un 10% en la simulación, excepto las temperaturas ambiente y el coeficiente de rendimiento de los calentadores de agua.
![Tabla I. Parámetros típicos de TCL [5]. Comunicación presentada al V Congreso Smart Grids.](https://static.smartgridsinfo.es/media/2019/02/cci5-uso-flexibilidad-cargas-electricas-inercia-termica-bateria-virtual-regulacion-red-tabla-1.png)
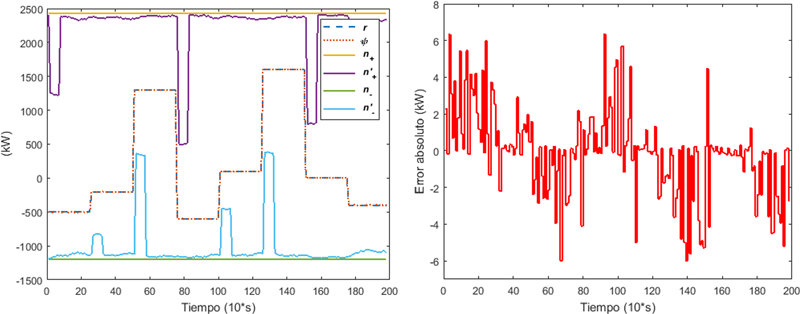
En las Figuras 4 y 5 se muestra como la señal del operador (r) es seguida por el sistema en cada instante con un error muy pequeño. Esta situación se mantiene siempre que no se exceden los límites marcados por n’+ y n’–. La señal r ha de entenderse como una desviación en la demanda de energía respecto a la que se tendría bajo las mismas condiciones si no se dispusiera del sistema de control propuesto. Así, r=-500 kW significa que se desea que la demanda agregada de las TCL sea 500 kW inferior a la que se tendría en esas condiciones ambientales.
La batería virtual no llega a cargarse o descargarse completamente, como se aprecia en las Figuras 1 y 2, a causa de que las TCL tienen que esperar 60 segundos para volver a cambiar de estatus.
En caso de eliminar esta restricción, la batería virtual sí puede llegar a descargarse o cargarse prácticamente por completo. El hecho de que el estado de carga de la batería sea próximo a 0 o al valor de la capacidad máxima correspondiente provoca que los valores de n’+ y n’– se reduzcan cada vez más, lo que se entiende como una disminución de la flexibilidad de la batería virtual en ese instante.
Cc, Cd, n+ y n– son constantes debido a que la temperatura ambiente no cambia con el tiempo en esta simulación.
Conclusiones
En este trabajo se ha expuesto un sistema de control para una batería virtual compuesta por TCL que permite determinar en cada instante la potencia máxima de carga y descarga que se le puede solicitar. Además, se ha comprobado que el sistema sigue perfectamente la señal de potencia del operador siempre que no sean rebasados los límites de potencia instantánea y que respeta las preferencias de los usuarios.
Así, gracias a este sistema de control, la batería virtual es un elemento fiable a la hora de proporcionar servicios de eqilibrado de red. Sin embargo, existen limitaciones. La más evidente es que las potencias de carga y descarga máximas solo se pueden conocer con un instante de antelación, lo cual no debe suponer un gran problema siempre que la señal del operador no sea desproporcionada y se evite descargar rápidamente la batería.
Referencias
- [1] Hao, H., Sanandaji, B. M., Poolla, K., & Vincent, T. L., 2013, A generalized battery model of a collection of thermostatically controlled loads for providing ancillary service, 51st Annual Allerton Conference (pp. 551-558), IEEE.
- [2] Hao, H., Sanandaji, B. M., Poolla, K., & Vincent, T. L., 2015, Aggregate flexibility of thermostatically controlled loads, IEEE Transactions on Power Systems, 30(1), 189-198.
- [3] Khan, S., Shahzad, M., Habib, U., Gawlik, W., & Palensky, P., 2016, Stochastic battery model for aggregation of thermostatically controlled loads, 2016 IEEE International Conference (pp. 570-575), IEEE.
- [4] Lakshmanan, V., Marinelli, M., Kosek, A. M., Nørgård, P. B., & Bindner, H. W., 2016, Impact of thermostatically controlled loads’ demand response activation on aggregated power: A field experiment, Energy, 94 (pp. 705-714).
- [5] Mathieu, J. L., Dyson, M., & Callaway, D. S., 2012, Using residential electric loads for fast demand response: The potential resource and revenues, the costs, and policy recommendations, Proceedings of the ACEEE Summer Study on Buildings.
- [6] Mathieu, J. L., Kamgarpour, M., Lygeros, J., & Callaway, D. S., 2013, Energy arbitrage with thermostatically controlled loads. European Control Conference (pp. 2519-2526), IEEE.