Comunicación presentada al III Congreso Smart Grids:
Autores
- Eduardo Martínez Carrasco, Estudios de Red y Smart Grids, Área de Redes y Subestaciones, Fundación CIRCE.
- Marta Abad López, Estudios de Red y Smart Grids, Área de Redes y Subestaciones
- Samuel Borroy Vicente, Director del Área de Redes y Subestaciones
- Laura Giménez de Urtasun, Directora Estudios de Red y Smart Grids, Área de Redes y Subestaciones
Resumen
Las nuevas funcionalidades y características de las redes de distribución con tecnología Smart Grid requieren nuevos procedimientos de protección y control de las mismas. El trabajo que se presenta muestra el desarrollo de una protección de MT que incorpora funcionalidades nuevas como la de la localización de faltas en una red mallada y con generación distribuida. Se muestran ensayos realizados a la protección, colocada en configuración «Hardware in the Loop (HIL)», mediante un equipo de simulación en tiempo real (RTDS), en el marco del proyecto Europeo DISCERN. Se analiza en laboratorio el correcto funcionamiento de las funciones de la protección de forma previa a su instalación, teniendo en cuenta los escenarios posibles de trabajo del equipo, de manera que se verifica de forma segura su correcto funcionamiento e interacción con la red eléctrica.
Palabras clave
DISCERN, RTDS, Protección, Localización de Faltas
Necesidad de la localización de faltas en redes de distribución
Uno de los objetivos de la evolución de las redes eléctricas hacia las Smart Grids es la mejora de la continuidad de suministro y reducción de los tiempos de interrupción. Para lograr este objetivo se requiere una mejora de los procesos de reposición de suministro y autocicatrización de las redes de distribución de media tensión, lo cual impone como necesidad principal una adecuada localización de faltas.
En la actualidad, el procedimiento habitual para la localización del tramo de la red afectado por una falta en redes de distribución eléctrica con bajo nivel de automatización/telecontrol depende de la labor de una brigada de mantenimiento que, tras el aviso del centro de control, se traslada hasta la zona afectada para ubicar y aislar la falta. Si la red no está telemandada, se sigue un proceso conocido como bisección o búsqueda dicotómica. En cada desplazamiento, la brigada se dirige al punto de la red cuya operación proporciona mayor información, típicamente el punto medio, y mediante la operación de las protecciones de cabecera y del centro de transformación (CT) los operarios pueden detectar si la falta se ha producido aguas arriba o aguas abajo del punto analizado. En redes con mayor capacidad de telecontrol, se sigue un proceso equivalente, pero en este caso realizando las maniobras sobre los seccionadores telecontrolados desde el centro de control de forma remota.
En línea con los objetivos apuntados de las redes inteligentes, el desarrollo de técnicas de localización de faltas permite reducir el tiempo de localización de la falta y, por tanto, minimizar el tiempo empleado en el proceso de reposición del sistema (con la consiguiente interrupción del suminiatro), así como los costes de operación.
Durante el proyecto europeo FP7 DISCERN (Distributed Intelligence for Cost-effective and Reliable Solutions), diferentes compañías de distribución eléctrica han puesto en común sus experiencias referentes a un aumento de la automatización y al uso de diferentes tecnologías que les permitan mejorar la localización de faltas, entre ellas estaban el simple aumento de telecontrol o el uso de métodos más avanzados, algunos de los cuales se describen en el siguiente apartado, como el uso de detectores de paso de falta, o la implementación de un equipo de localización de faltas en cabecera de la línea. Un modelo de esta última tecnología que no había sido implementada hasta el momento en campo, fue probado en el equipo RTDS, para verificar la correcta actuación de sus funciones de forma previa a la realización de las simulaciones y a la implementación en campo de la localización de falta.
Métodos de localización de faltas
Los trabajos de investigación desarrollados hasta la fecha han tratado de aportar mejoras en las estrategias de búsqueda de averías en redes de distribución. Estos métodos se pueden clasificar en tres grandes grupos: métodos basados en el cálculo de la impedancia aparente hasta la falta, métodos basados en la detección de transitorios y ondas viajeras y métodos basados en el conocimiento previo de la red, como por ejemplo, métodos de inteligencia artificial. Sin embargo, estos métodos presentan una serie de desventajas, tal como se indica a continuación.
El principal inconveniente de los métodos basados en el cálculo de impedancia, pese a resultar atractivos por su simplicidad y bajo coste de implementación, es que factores como la resistencia de falta, los flujos de potencia en estado de pre-falta y comportamiento impreciso en determinados regímenes de neutro, introducen importantes errores en la localización de la falta. Además, la existencia de ramificaciones puede dar lugar a la estimación de múltiples posibles puntos de falta (Ferreira et. al, 2012).
Los métodos basados en detección de transitorios y ondas viajeras ofrecen gran precisión en cuanto a localización de la falta, ya que no se ven afectados por parámetros constructivos de la red. Sin embargo, su implementación requiere de la instalación adicional de equipos de adquisición de alta frecuencia para capturar los transitorios que se generan durante la falta, lo que los convierte en una técnica compleja y costosa (Jensen, 2014).
Por último, a pesar de que los métodos basados en el conocimiento de la red tienen un bajo coste de implementación, su principal inconveniente es la dependencia que presentan en cuanto a la cantidad y calidad de los datos tratados para producir un algoritmo bien entrenado que contemple todos los posibles escenarios de falta, que en muchos casos es difícil de llevar a cabo. Además, la respuesta del algoritmo está condicionada a una determinada topología de explotación de la red, que puede variar de forma impredecible, por lo que el entrenamiento del algoritmo debe iniciarse de nuevo cada vez que se producen cambios en el sistema.
Enmarcado en este grupo se puede encontrar la utilización de indicadores de paso de falta, uno de los métodos de localización de falta que comienzan a implementarse de forma creciente en la actualidad. Estos dispositivos, situados en los CT, señalizan si ha circulado por ellos una intensidad de falta con el objetivo de guiar a los operarios u operadores del centro de control en la localización de los CT de la línea en falta en los que se debe maniobrar para aislar y reparar el tramo afectado. Sin embargo, el comportamiento de los sensores puede verse comprometido con el efecto de la resistencia de falta, corrientes capacitivas y corrientes de energización de transformadores. Además, la incorporación de generación distribuida (GD) en la red de media tensión (MT) implica variaciones en la magnitud y dirección de las corrientes de falta, dependiendo de la ubicación de la falta y los generadores conectados a la red en el momento de la misma. Por lo tanto, ante una falta en una línea de MT, además de la aportación desde la red de alta tensión (AT), también puede existir aportación desde los generadores distribuidos en la línea MT, según la tecnología empleada, lo que puede causar errores en la operación de los detectores de paso de falta.
Ante la dificultad de los métodos actuales para resolver el problema de la localización de faltas en redes de distribución, se ha desarrollado un prototipo localizador de faltas que no utiliza ninguno de los métodos mencionados anteriormente. Su principio de operación, basado en la inyección de pulsos de alta frecuencia en la red eléctrica, hace que su comportamiento no se vea afectado por la magnitud de las corrientes de falta y, por tanto, es independiente tanto de la penetración de GD como de la puesta a tierra del neutro de la red. Además de la función de localización de faltas, el equipo se complementa con funciones de protección (detección de falta), necesarias para la activación de la función de localización. Es por ello que una adecuada actuación de las funciones de detección de falta resulta crítica para la correcta inicialización del algoritmo de localización.
En los siguientes apartados se describe la metodología y pruebas realizadas al equipo localizador para la comprobación y depuración del buen funcionamiento de las funciones de protección que éste integra.
Prueba de funciones de protección en laboratorio con RTDS
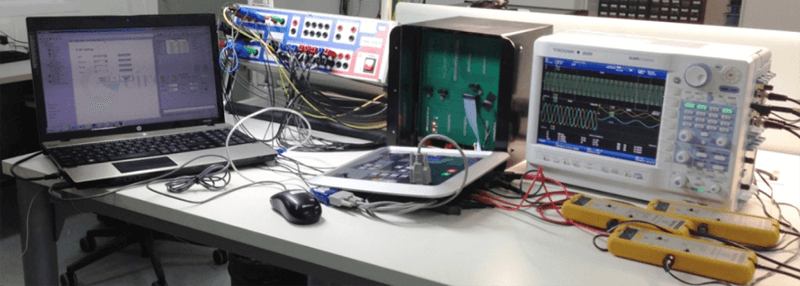
La validación de las distintas funciones de protección se ha realizado mediante el equipo inyección OMICRON CMC 256, el simulador RTDS y los amplificadores de tensión e intensidad Doble F6350 y Doble F6300.
Se muestra en la Figura 1 el banco de pruebas de laboratorio donde se efectúan pruebas de funcionamiento al equipo mediante maleta de ensayos OMICRON.
La realización de pruebas mediante maleta de ensayos OMICRON permite realizar comprobaciones de cumplimiento de ajustes introducidos para las distintas funciones de protección.
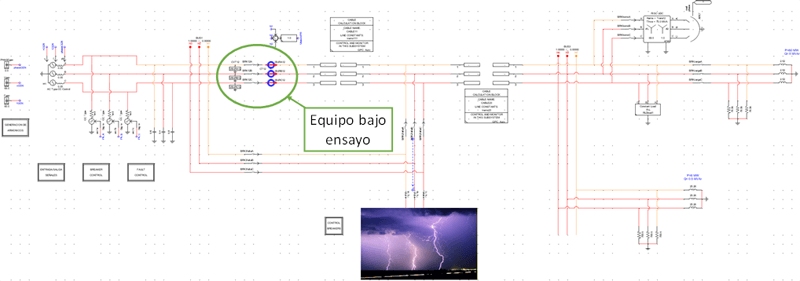
Además de estas pruebas funcionales para comprobar la correspondencia entre los ajustes introducidos y la respuesta de la protección son necesarias pruebas que permitan la interacción del equipo bajo ensayo con una red eléctrica, utilizando para ello técnicas “Hardware in the Loop” (HIL). Es por ello que en el marco del proyecto DISCERN se realizan pruebas mediante el simulador de tiempo real RTDS (Real-Time Digital Simulator). La capacidad de simulación en tiempo real permite que el equipo en prueba pueda intercambiar señales reales con la red modelada en el banco de ensayo HIL de forma equivalente a una red real. La Figura 2 muestra la red eléctrica de media tensión donde va a ser instalado el dispositivo modelado en RTDS. La capacidad de simulación en tiempo real permite que el equipo en prueba pueda recibir señales procedentes del banco de ensayo HIL como si proviniesen de una red real y, de esta manera, estudiar su comportamiento.
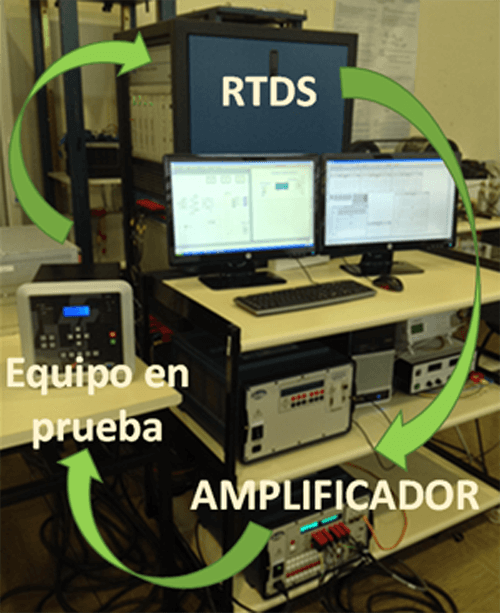
Se muestra en la Figura 3 el banco de ensayos de laboratorio con RTDS. Además del simulador RTDS y el equipo en prueba el laboratorio incluye un amplificador de señales, necesario para amplificar las magnitudes obtenidas por el simulador, de baja amplitud, hasta niveles equivalentes al secundario de un transformador de medida de subestación. De esta manera, cableando las señales de tensión y corriente al equipo en prueba, y tomando de éste la señal de disparo de vuelta al simulador RTDS, se conforma un entorno de prueba del tipo “Hardware in the Loop”, permitiendo realizar una validación interna sobre la actuación de las funciones de protección que se encuentran implementadas en el equipo.
Ensayos realizados: Resultados
Los ensayos realizados en RTDS para la validación de las funciones de protección han permitido comprobar el correcto funcionamiento de las mismas ante diversas situaciones de falta que pueden tener lugar en la red eléctrica. Una de las funciones principales en las protecciones de línea en media tensión, y que se ha ensayado en el banco de ensayos HIL es la de sobreintensidad instantánea y temporizada tanto de neutro como de fases (50/51, 50N/51N), incluyendo verificación de direccionalidad (67/67N). Para comprobar el correcto funcionamiento de esta función de protección, se han realizado ensayos como:
- Faltas involucrando distinto número de fases: Monofásica, bifásica, trifásica.
- Faltas evolutivas: Incluyendo cambio de resistencia de falta y modificación de las fases involucradas en la falta (e.g. falta monofásica que evoluciona a bifásica)
- Faltas con diferente régimen de neutro: Neutro aislado o conectado a tierra de forma rígida o a través de una impedancia
- Comprobación de extinción de falta antes de producirse el disparo de la protección.
- Faltas inicialmente vistas “de frente” en la línea y que pasa a existir falta “de espaldas”.
A modo de ejemplo, se muestra a continuación la oscilografía generada por una falta evolutiva, que se inicia con una resistencia de falta igual a 0 ohm y que posteriormente cambia a 10 ohm de falta. Dicha oscilografía se muestra en la Figura 4.
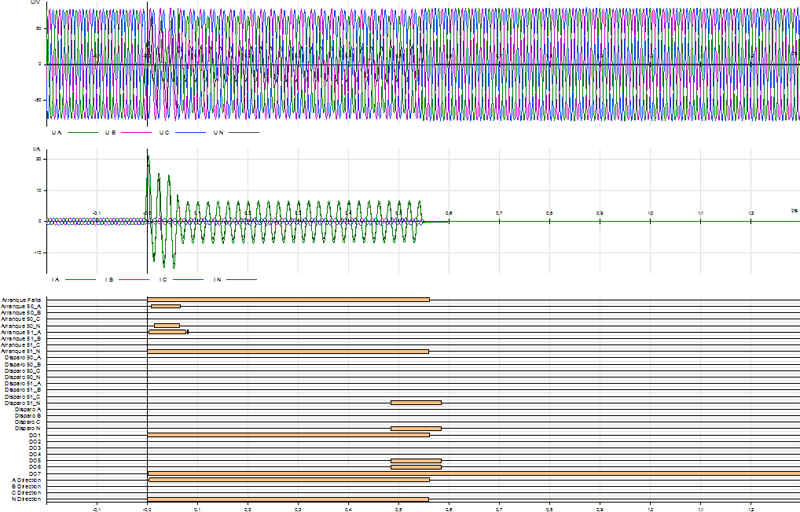
La corriente de falta, debido al cambio de valor de resistencia de 0 a 10 ohm, disminuye a un valor inferior a Inst. Current (corriente de disparo del elemento 50), y superior a I pickup (corriente de arranque del elemento 51N), transcurrido un tiempo desde el inicio de la falta inferior al necesario para el disparo de la función 50.
En este ensayo se verifica la correcta adecuación, en tiempo real, del tiempo de disparo a la corriente medida. Al inicio de la falta la corriente medida es superior a Inst. Current, pero antes de que se cumpla el tiempo fijado para el disparo del elemento, la corriente disminuye por debajo de ese valor, pasando a ser el elemento 51N el responsable del disparo. Se verifica que el tiempo de disparo es el correspondiente a la curva temporizada, de acuerdo a los ajustes implementados.
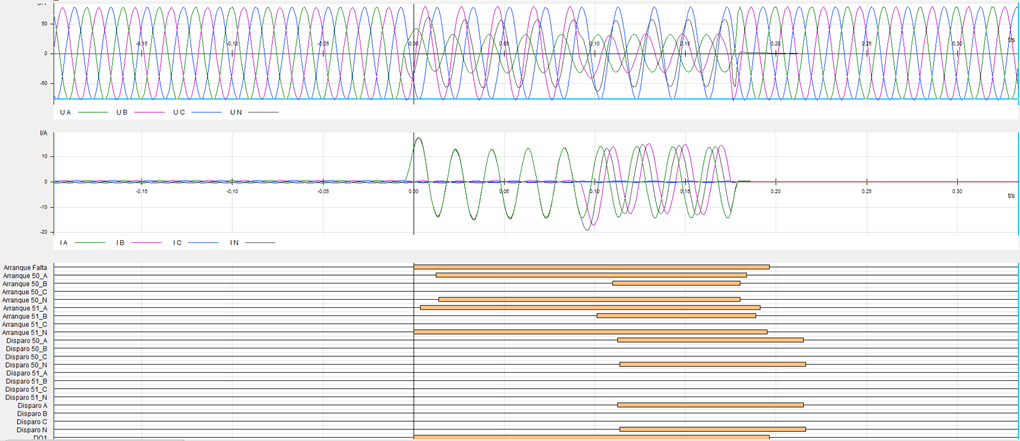
Por otra parte, en un nuevo ejemplo, se muestra en la Figura 5 una falta franca evolutiva de monofásica a tierra a bifásica a tierra en red con neutro rígido a tierra. Se observa que en primer lugar arranca el elemento 50 y 51 de la fase A y de neutro. Posteriormente, cuando la falta evoluciona a bifásica, arranca también el elemento 50 y 51 de la fase B. Finalmente, la protección dispara por el elemento 50 de fase A y neutro, puesto que cumple en primer lugar las condiciones de tiempo de disparo ajustadas.
Conclusiones y próximos pasos
Como puede comprobarse por la variedad de los estudios de cortocircuito realizados sobre el funcionamiento del equipo, el banco de pruebas RTDS proporciona un gran potencial para el ensayo de equipos inteligentes reales como validación previa a su conexión a la red eléctrica.
RTDS proporciona la opción de realizar ensayos que en una red eléctrica serían potencialmente muy destructivos, en un entorno seguro de laboratorio con una muy buena aproximación a la realidad. La realización de estos ensayos ha permitido a CIRCE, como desarrollador del dispositivo, realizar una eficiente depuración de los algoritmos de protección en un banco de pruebas que proporciona entradas al equipo equivalentes a las que este va a encontrarse una vez sea instalado. El proceso descrito en este artículo se ha llevado a cabo en el marco del proyecto europeo DISCERN. En él se realizaron pruebas con RTDS a un equipo con la funcionalidad de detección y localización de faltas de forma previa a futuras pruebas en campo.
Durante el desarrollo del proyecto se alcanzaron importantes avances en los métodos de localización de faltas, así como en las técnicas de validación de algoritmos de protección. A partir de esta base el equipo de investigación continúa evolucionando el desarrollo de algoritmos de localización de faltas en redes de distribución.
Agradecimientos
Los estudios presentados en este artículo se enmarcan dentro del Proyecto Europeo DISCERN (Distributed Intelligence for Cost-effective and Reliable Solutions) financiado por la Comisión Europea dentro de su programa FP7 (grant agreement Nº 308913).
Referencias
- Ferreira, G. D., Gazzana, D. S., Bretas, A. S., Netto, A. S., 2012, A unified impedance-based fault location method for generalized distribution systems, IEEE Power and Energy Society General Meeting, 1-8.
- Jensen, C. F., 2014, Online location of faults on AC cables in underground transmission systems, Springer International Publishing, Switzerland.